从代码级看syscall的问题
1.寄存器eax,传进来带的是中调用号,ret_from_sys_call()传出的是错误值。
2.由于内核函数是在内核中实现的,因此它必须符合内核编程的规则,比如函数名以sys_开始,函数定义时候需加asmlinkage标识符等。这个修饰符使得GCC编译器从堆栈中取该函数的参数而不是寄存器中。另外,系统调用函数的命名规则都是sys_XXX的形式。
3.不同的syscall,普通用户可用的命令和管理可用的命令分别被存放于/bin和/sbin目录下。
另外比较重要的一个特性就是在Linux 3.X系统中添加新的syscall 这相比于Linux 2.X添加syscall简单不少。Linux 2.X内核网上很多添加调用分析,就不赘述了。
1.定义系统调用服务例程。
#include <linux/syscall.h>
SYSCALL_DEFINE0(mycall)
{
struct task_struct *p;
printk("********************************************\n");
printk("------------the output of mysyscall------------\n");
printk("********************************************\n\n");
printk("%-20s %-6s %-6s %-20s\n","Name","pid","state","ParentName");
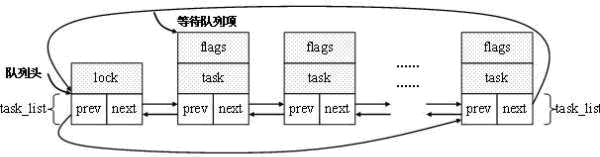
for(p = &init_task; (p = next_task(p)) != &init_task;)
printk("%-20s %-6d %-6d %-20s\n",p->comm , p->pid, p->state, p->parent->comm);
return 0;
}
以上定义宏SYSCALL_DEFINE0实际上会扩展为:
asmlinkage int sys_mycall()
{
struct task_struct *p;
printk("********************************************\n");
printk("------------the output of mysyscall------------\n");
printk("********************************************\n\n");
printk("%-20s %-6s %-6s %-20s\n","Name","pid","state","ParentName");
for(p = &init_task; (p = next_task(p)) != &init_task;)
printk("%-20s %-6d %-6d %-20s\n",p->comm , p->pid, p->state, p->parent->comm);
return 0;
}
内核在kernel/sys.c文件中定义了SYSCALL_DEFINE0~SYSCALL_DEFINE6等七个提供便利的宏。
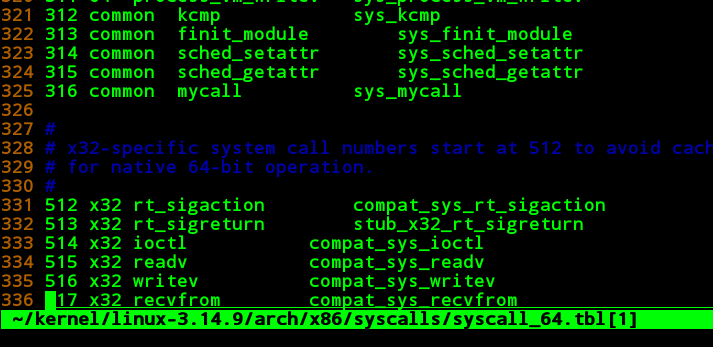
2. 为系统调用服务例程在系统调用表中添加一个表项。
编译文件arch/x86/syscalls/syscall_64.tbl,在调用号小于512的部分追加一行:
注意:
① 上面的316是紧接着目前已定义系统调用315之后。
② 若为32系统添加系统调用号,在syscall_32.tbl中相应位置追加即可。系统调用在两个文件中的调用号没有必要一样。
③ 不需要像Linux 2.6的内核一样,在<asm/unistd.h>中添加类似于#define __NR_getjiffies 314之类的宏定义了,3.x的内核会自动根据系统调用表的定义生成。
3. 在内核头文件中,添加服务例程的声明。
在include/linux/syscalls.h文件的最后,#endif之前加入系统调用服务例程sys_mysyscall()的声明:
asmlinkage long sys_mycall(void); #endif
剩下就是按照编译内核的方法进行编译好了 http://www.lizhaozhong.info/archives/496
4.系统调用表产生的过程
之所以Linux3.X与Linux2.X变化这么大。
主要是为了简化添加调用表的过程。
1. 系统调用表的产生过程。
内核开发者是在syscall_64.tbl中声明系统调用号与服务例程的对应关系,以及其ABI,但系统调用表的真正定义是在arch/x86/kernel/syscall_64.c中。
1)arch/x86/kernel/syscall_64.c, arch/x86/kernel/syscall_32.c文件中存放了实际的系统调用表定义,以64位系统为例,其中有如下内容:
#include <asm/asm-offsets.h>
#define __SYSCALL_COMMON(nr, sym, compat) __SYSCALL_64(nr, sym, compat)
#ifdef CONFIG_X86_X32_ABI
# define __SYSCALL_X32(nr, sym, compat) __SYSCALL_64(nr, sym, compat)
#else
# define __SYSCALL_X32(nr, sym, compat) /* nothing */
#endif
#define __SYSCALL_64(nr, sym, compat) extern asmlinkage void sym(void) ; // 注意,是分号结尾
#include <asm/syscalls_64.h> // 引入系统调用服务例程的声明
#undef __SYSCALL_64
#define __SYSCALL_64(nr, sym, compat) [nr] = sym, //注意,是逗号结尾
typedef void (*sys_call_ptr_t)(void);
extern void sys_ni_syscall(void);
const sys_call_ptr_t sys_call_table[__NR_syscall_max+1] = { //系统调用表定义
/*
* Smells like a compiler bug -- it doesn't work
* when the & below is removed.
*/
[0 ... __NR_syscall_max] = &sys_ni_syscall,
<strong>#include <asm/syscalls_64.h> // 系统调用服务例程地址,对应arch/x86/include/generated/asm/syscalls_64.h文件</strong>
};
2) arch/x86/syscalls目录中的syscall_64.tbl、syscall_32.tbl文件是系统调用表声明。syscalltbl.sh脚本负责生产syscalls_XX.h文件,由Makefile负责驱动
3) arch/x86/include/generated目录,其中存放根据arch/x86/syscalls目录生成的文件。主要有generated/asm/syscalls_64.h、generated/asm/syscalls_32.h文件,用于生成系统调用表数组。生成的syscalls_64.h内容部分如下:

2. 系统调用号声明头文件的生成(#define0 __NR_xxx之类的信息)。
类似于系统调用表的产生,arch/x86/syscalls/syscallhdr.sh脚本负责generated/uapi/asm/unistd_32.h, generated/uapi/asm/unistd_64.h文件,unistd_XX.h文件又被间接include到asm/unistd.h中,后者最终被include用户空间使用的<sys/syscall.h>文件中(安装之后)。生成的generated/uapi/asm/unistd_64.h部分内容如下
... ... #define __NR_sched_getattr 315 #define __NR_mycall 316 #endif /* _ASM_X86_UNISTD_64_H */
注意,这里的unistd.h文件与用户空间使用的文件没有任何关系,后者声明了系统调用包装函数,包括syscall函数等
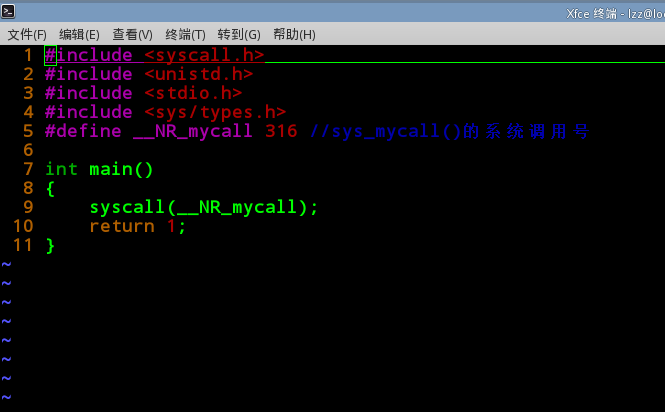
下面我们来调用这个mycall()
还有一种方式使用内嵌汇编的方式,具体文件在arch/x86/um/shared/sysdep/stub_64.h下面,模拟_syscall0宏调用。
#define __syscall_clobber "r11","rcx","memory"
#define __syscall "syscall"
static inline long stub_syscall0(long syscall)
{
long ret;
__asm__ volatile (__syscall
: "=a" (ret)
: "0" (syscall) : __syscall_clobber );
return ret;
}
然后编译运行,打印在dmesg里面
kernel.dmesg
参考:
http://lwn.net/Articles/604287/
http://lwn.net/Articles/604515/