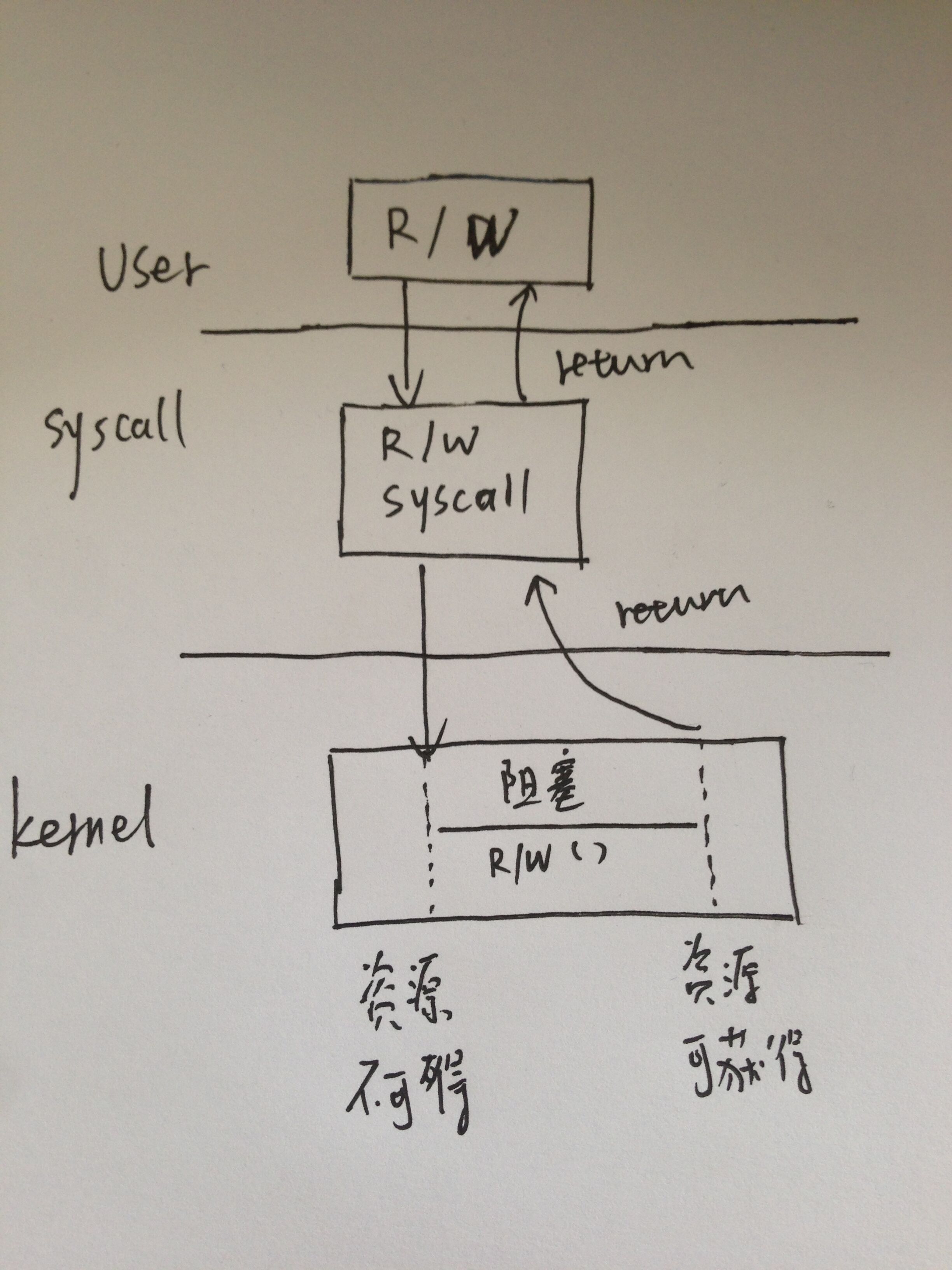
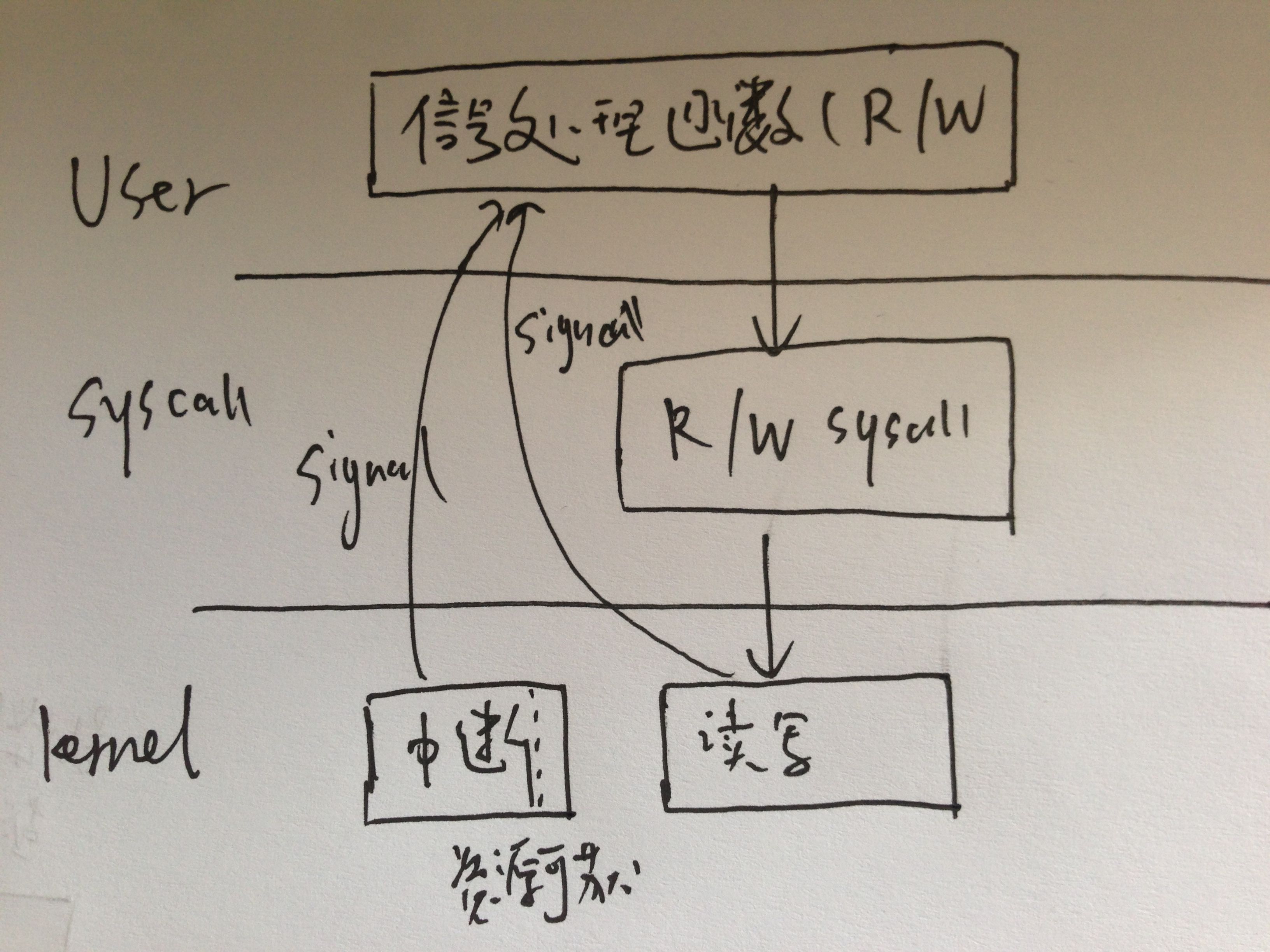
首先明确杀死一个进程与杀死一个kthread是不同的,杀死进程的时机是进程从内核态返回到用户态检查_TIF_SIGPENDING标志位,进一步进入到处理信号的函数进行处理杀死这个进程。
内核线程运行在整个内核之上,,如果不返回,则不可能检查信号,所以内核的线程实质上的停止与启动必须由线程本身状态决定,不允许随意杀死。如果这个线程正在持有某个全局锁时,强制杀死kthread会造成整个内核的死锁。所以目前kernel对于内核线程的停止主要依赖于线程内部的停止。
一种方式
发送信号,对于内核线程默认是对于信号是忽略的,所以我们要想停止一个线程必须在线程内部使用allow_signal(SIGKILL)方式,然后在内核线程代码的某个部位处理这个信号。所以发送信号的时机非常重要,如果当前kthread正在进行某些业务逻辑,那么发送SIGKILL无效。
另外一种方式
使用目前kernel提供工具函数int kthread_stop(struct task_struct *k) 用来对某个kthread进行停止。这个函数仅仅限于kthread_create()创建的内核线程,通过这个函数创建的内核线程都会被挂在kthreadd 内核线程树上。这种方式也可以被看作是一种发送信号的方式,但是这些函数已经被提供出来供编写者用来停止内核线程。线程内部必须显式的检查THREAD_SHOULD_STOP信号,从而使得线程return或者使用do_exit()退出线程[1]。否则无法停止内核线程。
当kthread_create()创建的内核线程时:
kthread_create
-> kthread_create_on_node // in kthead.c
-> adds your thread request to kthread_create_list
-> wakes up the kthreadd_task
当唤醒kthreadd_task时,这个函数会运行kthreadd()。
pid = kernel_thread(kthreadd, NULL, CLONE_FS | CLONE_FILES);
...
kthreadd_task = find_task_by_pid_ns(pid, &init_pid_ns);
kthreadd()这个函数会调用kthread()函数。kthread()函数 调用用户定义的内核线程函数。
kthreadd // all in kthread.c
-> create_kthread
-> kernel_thread(kthread, your_kthread_create_info, ...)
kthread()函数会调用我们自己创建的内核线程函数,当需要停止的时候,检查KTHREAD_SHOULD_STOP位,当返回后会将ret值传递到do_exit(ret),这个也就是我们不用显示调用do_exit()的原因。
kthread
-> initialization stuff
-> schedule() // allows you to cancel the thread before it's actually started
-> if (!should_stop)
-> ret = your_thread_function()
-> do_exit(ret)
注意:内核线程return时,默认调用do_exit(ret),如果直接使用do_exit()退出线程,那么必须保证task_struct不被释放否则当继续执行kthread_stop()会释放一个无效的task_struct,导致发生Oops。[4]
当需要停止目标内核线程,kernel会获取当前描述目标内核线程状态的结构体kthread,设置KTHREAD_SHOULD_STOP标示位,然后唤醒这个目标线程,当前进程调用wake_for_completion(&kthread->exited)睡眠,被唤醒的条件其实就是这个目标内核线程的task_struct 上的vfork_done完成,这个标志位在do_exit()中被设置。当前进程/内核线程等待目标内核线程结束的过程时不可中断的,直到目标内核线程退出,最后释放task_struct结构体,这样就可以安全的停止当前线程。
int kthread_stop(struct task_struct *k)
{
struct kthread *kthread;
int ret;
trace_sched_kthread_stop(k);
get_task_struct(k);
kthread = to_live_kthread(k);
if (kthread) {
set_bit(KTHREAD_SHOULD_STOP, &kthread->flags);
__kthread_unpark(k, kthread);
wake_up_process(k);
wait_for_completion(&kthread->exited);
}
ret = k->exit_code;
put_task_struct(k);
trace_sched_kthread_stop_ret(ret);
return ret;
}
上面的代码必须确保task_struct有效,如果无效,调用这个函数会发生Oops。
在内核线程中的业务处理逻辑外使用kthread_should_stop()检查当前线程的KTHREAD_SHOULD_STOP标志位,如果被设置,退出循环,就要执行线程的退出操作。
do {
//do business
} while(!kthread_should_stop());
[1] http://v4l.videotechnology.com/dwg/kernelthreads/kernelthreads.html
[2] http://lwn.net/Articles/65178/
[3] http://blog.csdn.net/chinayangbo2011/article/details/8923731
[4] http://stackoverflow.com/questions/10177641/proper-way-of-handling-threads-in-kernel