Update 2015-6-24
最近在看APUE的信号章节,在这里我总结下进程信号处理中应该注意的一些坑。Unix中有很多的信号是可以被进程接管,然后跳到信号处理函数中。
1. 有两个信号是无法被接管或者被忽略的SIGKILL与SIGSTOP
2. SIGHUP 是要出现在远程ssh一台主机时,连接意外断开时,系统会向所有与这个终端相关的控制进程发送SIGHUP。
3. 在liunx中SIGIO与SIGPOLL相同,默认是终止这个进程。
4. SIGTERM可以由进程编写者定义,当收到这个信号那么,进程可以自行做退出操作的扫尾工作,然后退出程序。
5. signal与sigaction功能相似,但是signal在不同平台上实现不同,应该使用sigaction进程信号的接管。
6. 交互式进程后台运行时,shell会将后台进程设置为对于中断和退出信号的处理方式设置为忽略SIG_IGN。也就是说当向进程发送SIGINT时,捕捉这种类型的代码:
void sig_int(int), sig_quit(int);
if (signal(SIGINT, SIG_IGN) != SIG_IGN)
signal(SIGINT, sig_int);
if (signal(SIGQUIT, SIG_IGN) != SIG_IGN)
signal(SIGQUIT, sig_quit);
7. 当父进程fork()一个子进程,子进程将会继承父进程的信号处理函数,这种方式在早期fork()一个子进程后会把这个子进程信号处理函数复位到默认值,我们不必在代码中这么做:
int sig_int(); /* my signal handling function */
...
signal(SIGINT, sig_int); /* establish handler */
...
sig_int()
{
signal(SIGINT, sig_int); /* reestablish handler for next time */
... /* process the signal ... */
}
8. 信号会发生在任何时刻,我们不能设置flag来使得进程进行忙等。下面这种代码在大多数情况下是正确的,但是如果信号发生在while()与pause()之间,会直接导致进程陷入睡眠,无法醒来。
int sig_int(); /* my signal handling function */
int sig_int_flag; /* set nonzero when signal occurs */
main()
{
signal(SIGINT, sig_int); /* establish handler */
...
while (sig_int_flag == 0)
pause(); /* go to sleep, waiting for signal */
...
}
sig_int()
{
signal(SIGINT, sig_int); /* reestablish handler for next time */
sig_int_flag = 1; /* set flag for main loop to examine */
}
9. 被中断的syscall(通常是慢速系统调用:read,write,open()(如果open不返回,就意味着进程会被永久的阻塞) etc.)必须显式的处理出错返回,在linux中被中断的syscall,会重启这个syscall,但是在当次的调用中,会将errno设置为EINTR,所以我们要对这个EINTR进行处理。如下面的代码:
again:
if ((n = read(fd, buf, BUFFSIZE)) < 0) {
if (errno == EINTR)
goto again; /* just an interrupted system call */
/* handle other errors */
}
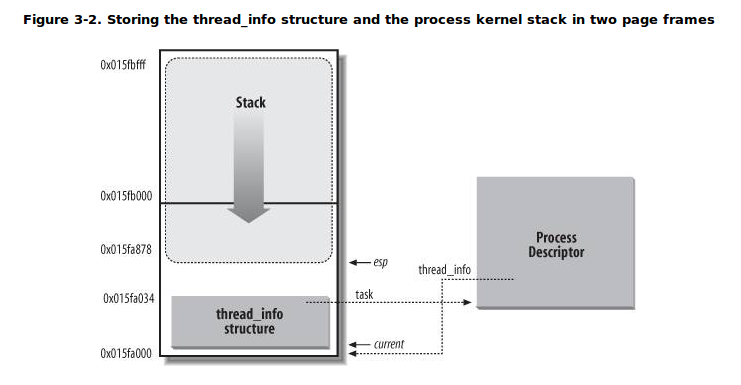
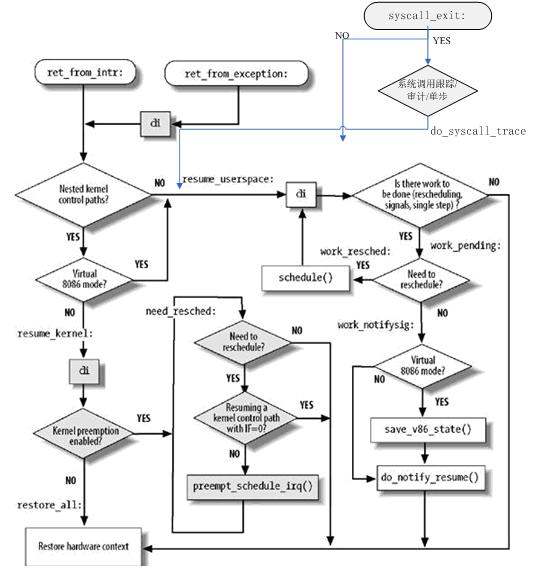
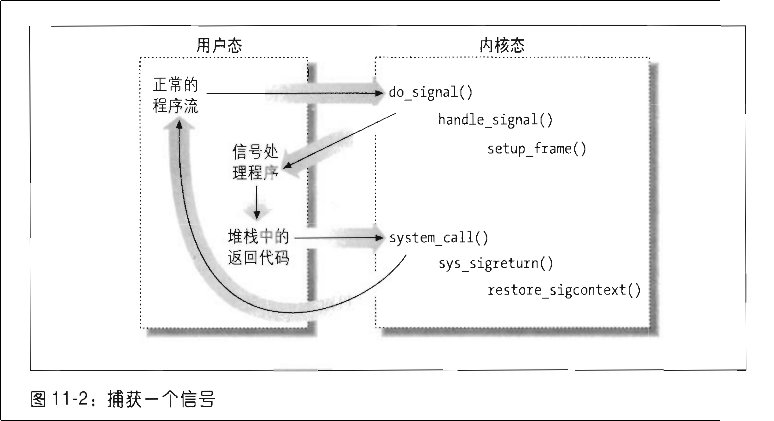
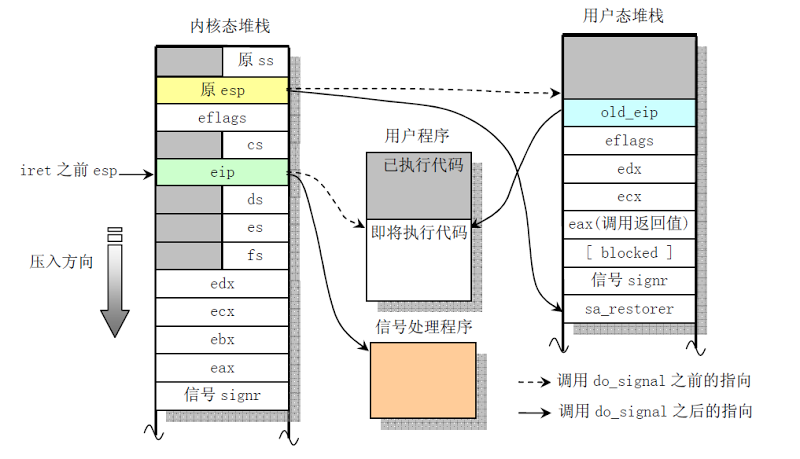
10. 信号处理函数的可重入性。如果在信号处理函数中调用,会对进程主体的程序执行流造成破坏,产生Sigment fault。在内核中的实现,我发现为了实现进程处理函数在用户态执行,会将内核态的堆栈数据复制到用户空间的堆栈保存,返回用户空间,执行完sys_sigreturn() 再次陷入到内核,将正常程序的用户态堆栈硬件上下文拷贝到内核堆栈,并将之前备份在用户空间的堆栈还原到内核空间,完成这次中断处理函数。
不可重入性:(a) they are known to use static data structures, (b) they call malloc or free, or (c) they are part of the standard I/O library. Most implementations of the standard I/O library use global data structures in a nonreentrant way.
所以按照定义,为了保证函数是可重入的,需要做到一下几点:
- 不在函数内部使用静态或者全局数据
- 不返回静态或者全局数据,所有的数据都由函数调用者提供
- 使用本地数据,或者通过制作全局数据的本地拷贝来保护全局数据
- 如果必须访问全局数据,使用互斥锁来保护
- 不调用不可重入函数
getpwnam()函数是非可重入函数,他在中断处理函数中使用的话,就会修改原来应用程序的数据,导致程序出错
#include "apue.h"
#include <pwd.h>
static void
my_alarm(int signo)
{
struct passwd *rootptr;
printf("in signal handler\n");
if ((rootptr = getpwnam("root")) == NULL)
err_sys("getpwnam(root) error");
alarm(1);
}
int main(void)
{
struct passwd *ptr;
signal(SIGALRM, my_alarm);
alarm(1);
for ( ; ; ) {
if ((ptr = getpwnam("sar")) == NULL)
err_sys("getpwnam error");
if (strcmp(ptr->pw_name, "sar") != 0)
printf("return value corrupted!, pw_name = %s\n",ptr->pw_name);
}
}
这段代码中的rootptr其实最后都是指向ptr,这就是造成不可重入的关键!我们使用getpwnam_r()函数便可以正常工作。
void sig_handler(int signo)
{
struct passwd root_ptr;
struct passwd *result;
int s;
char *buf;
size_t bufsize;
bufsize = sysconf(_SC_GETPW_R_SIZE_MAX);
if(bufsize==-1)
bufsize = 16384;
buf = malloc(bufsize);
if(buf==NULL){
perror("malloc");
exit(EXIT_FAILURE);
}
printf("in sig_handler\n");
s = getpwnam_r("root",&root_ptr,buf,bufsize,&result);
if(result == NULL){
if(s==0)
printf("Not found\n");
else{
// errno = s;
perror("getpwnam_r");
}
exit(EXIT_FAILURE);
}
printf("pw_name = %s\n", root_ptr.pw_name);
alarm(1);
}
11. SIGCHLD这个信号非常特殊,这个信号很多时候与系统的信号实现相关。在linux平台上 SIGCHLD与SIGCLD等同,这里查看C/S模型下Server 中fork()的健壮性文章,我们需要在父进程信号处理函数中调用pid = wait(&stat);实现对于子进程退出的等待。
void sig_zchild(int signo)
{
pid_t pid;
int stat;
while ((pid = waitpid(-1, &stat, WNOHANG)) > 0)
printf("child %d terminated\n", pid);
return;
}
12. kill() 函数负责将信号发送给进程或者进程组,raise()是进程向自己发送信号。一个程序全局只能有一个alarm()函数,如果多次调用,那么alarm()登记的值被新值代替。pause()使得调用进程挂起直至捕捉到一个信号,只有执行了一个信号处理函数返回后,pause()才返回。
#include <signal.h>
#include <unistd.h>
static void
sig_alrm(int signo)
{
/* nothing to do, just return to wake up the pause */
}
unsigned int
sleep1(unsigned int seconds)
{
if (signal(SIGALRM, sig_alrm) == SIG_ERR)
return(seconds);
alarm(seconds); /* start the timer */
pause(); /* next caught signal wakes us up */
return(alarm(0)); /* turn off timer, return unslept time */
}
这个函数看似正确,但是有一个竞争条件,如果alarm()后调用被阻塞,然后超时,pause()没有捕捉到信号,那么调用到pause()将永久挂起,这里我们要使用到longjmp() 与 setjmp() 可以使得信号处理函数返回到主函数中指定位置,在longjmp第二个参数设置返回值,在setjmp()中检查这个返回值。可以做到跨函数跳跃,类似于函数内部的goto。
所以使用alarm() pause() 慢速系统调用三者很有可能产生竞争,Linux中syscall是被中断后自启动的。
13. 使用sigprocmask() 可以用来屏蔽,或者取消屏蔽某个信号,但是如果在sigprocmask()之后调用sleep() 函数,程序进入睡眠,这个期间产生的某个屏蔽信号,他会被投递到这个进程,进行处理! APUE 10-11
14. 使用sigaction(int signum, const struct sigaction *act,struct sigaction *oldact)对于信号进行处理,struct sigaction下的成员变量sa_flags可以定义各种中断的动作,包括被中断的系统调用是否会重启(SA_INTERUPT)还有信号处理函数只执行一次后复位等(SA_RESETHAND)默认sigaction()函数不再重启被中断的系统调用。
15. 使用int sigsuspend(const sigset_t *mask)函数可以挂起当前进程,但是当进程收到mask以外的信号并从中断处理函数返回,那么进程从这个函数返回!mask中的信号,进程会屏蔽掉[4]。
16. sleep() 函数与alarm()函数混用,实现需要依赖于具体实现。
17. SIGSTOP、SIGCONT不允许被接管,如果我们需要在SIGSTOP后自定义一些操作,那么我们可以自定义一个信号和信号处理函数。只要跳转到信号处理函数,那么就可以阻止进程访问错误内存地址,进而可以进行一些处理。
参考:
[1] http://www.cnblogs.com/mickole/p/3187770.html
[2] http://www.man7.org/linux/man-pages/man3/getpwnam.3.html
[3] http://blog.csdn.net/feiyinzilgd/article/details/5811157