接着http://www.lizhaozhong.info/archives/596写。
在操作系统原理里面,我们只学了进程有三个主要状态:阻塞态,就绪态,运行态。
在linux下,我们拓展出了 O,S,R,I,Z,T,B,D。我们可以使用top命令查看S位。
O:进程正在处理器运行,这个状态从来木见过.
S:休眠状态(sleeping)
R:等待运行(runable)R Running or runnable (on run queue) 进程处于运行或就绪状态
I:空闲状态(idle)
Z:僵尸状态(zombie)
T:跟踪状态(Traced)
B:进程正在等待更多的内存页
D:不可中断的深度睡眠,一般由IO引起,同步IO在做读或写操作时,cpu不能做其它事情,只能等待,这时进程处于这种状态,如果程序采用异步IO,这种状态应该就很少见到了
R (task_running) : 可执行状态
只有在该状态的进程才可能在CPU上运行。而同一时刻可能有多个进程处于可执行状态,这些进程的task_struct结构(进程控制块)被放入对应CPU的可执行队列中(一个进程最多只能出现在一个CPU的可执行队列中)。进程调度器的任务就是从各个CPU的可执行队列中分别选择一个进程在该CPU上运行。
很多操作系统教科书将正在CPU上执行的进程定义为RUNNING状态、而将可执行但是尚未被调度执行的进程定义为READY状态,这两种状态在linux下统一为TASK_RUNNING状态。
S (task_interruptible): 可中断的睡眠状态
处于这个状态的进程因为等待某某事件的发生(比如等待socket连接、等待信号量),而被挂起。这些进程的task_struct结构被放入对应事件的等待队列中。当这些事件发生时(由外部中断触发、或由其他进程触发),对应的等待队列中的一个或多个进程将被唤醒。
D (task_uninterruptible): 不可中断的睡眠状态
与task_interruptible状态类似,进程处于睡眠状态,但是此刻进程是不可中断的。不可中断,指的并不是CPU不响应外部硬件的中断,而是指进程不响应异步信号。
绝大多数情况下,进程处在睡眠状态时,总是应该能够响应异步信号的。但是uninterruptible sleep 状态的进程不接受外来的任何信号,因此无法用kill杀掉这些处于D状态的进程,无论是”kill”, “kill -9″还是”kill -15″,这种情况下,一个可选的方法就是reboot。
处于uninterruptible sleep状态的进程通常是在等待IO,比如磁盘IO,网络IO,其他外设IO,如果进程正在等待的IO在较长的时间内都没有响应,那么就被ps看到了,同时也就意味着很有可能有IO出了问题,可能是外设本身出了故障,也可能是比如挂载的远程文件系统已经不可访问了.
When the process is sleeping uninterruptibly, the signal will be noticed when the process returns from the system call or trap.
— 这句是关键。 当处于uninterruptibly sleep 状态时,只有当进程从system 调用返回时,才通知signal。
T(task_stopped or task_traced):暂停状态或跟踪状态
向进程发送一个sigstop信号,它就会因响应该信号而进入task_stopped状态(除非该进程本身处于task_uninterruptible状态而不响应信号)。(sigstop与sigkill信号一样,是非常强制的。不允许用户进程通过signal系列的系统调用重新设置对应的信号处理函数。)
向进程发送一个sigcont信号,可以让其从task_stopped状态恢复到task_running状态。
当进程正在被跟踪时,它处于task_traced这个特殊的状态。“正在被跟踪”指的是进程暂停下来,等待跟踪它的进程对它进行操作。比如在gdb中对被跟踪的进程下一个断点,进程在断点处停下来的时候就处于task_traced状态。而在其他时候,被跟踪的进程还是处于前面提到的那些状态。
对于进程本身来说,task_stopped和task_traced状态很类似,都是表示进程暂停下来。而task_traced状态相当于在task_stopped之上多了一层保护,处于task_traced状态的进程不能响应sigcont信号而被唤醒。比如GDB调试用的就是这个原理
Z (task_dead – exit_zombie):退出状态,进程成为僵尸进程
它已经放弃了几乎所有内存空间,没有任何可执行代码,也不能被调度,仅仅在进程列表中保留一个位置,记载该进程的退出状态等信息供其他进程收集,除此之外,僵尸进程不再占有任何内存空间。
原因:子进程在退出的过程中,内核会给其父进程发送一个信号,通知父进程来“收尸”。 父进程可以通过wait系列的系统调用(如wait4、waitid)来等待某个或某些子进程的退出,并获取它的退出信息。然后wait系列的系统调用会顺便将子进程的尸体(task_struct)也释放掉。
这个信号默认是SIGCHLD,但是在通过clone系统调用创建子进程时,可以设置这个信号。
如果他的父进程没安装SIGCHLD信号处理函数调用wait或waitpid()等待子进程结束,又没有显式忽略该信号,那么它就一直保持僵尸状态,子进程的尸体(task_struct)也就无法释放掉。
如果这时父进程结束了,那么init进程自动会接手这个子进程,为它收尸,它还是能被清除的。但是如果如果父进程是一个循环,不会结束,那么子进程就会一直保持僵尸状态,这就是为什么系统中有时会有很多的僵尸进程。
下面我贴出include/linux/sched.h中的struct task_struct结构,我去掉了SMP等编译宏。可以立即看到我们所需要的结构members,然后根据这个结构体来说明:
struct task_struct {
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
void *stack;
atomic_t usage;
unsigned int flags; /* per process flags, defined below */
unsigned int ptrace;
#ifdef CONFIG_SMP
struct llist_node wake_entry;
int on_cpu;
#endif
int on_rq;
int prio, static_prio, normal_prio;
unsigned int rt_priority;
const struct sched_class *sched_class;
struct sched_entity se;
struct sched_rt_entity rt;
.....
/*
* fpu_counter contains the number of consecutive context switches
* that the FPU is used. If this is over a threshold, the lazy fpu
* saving becomes unlazy to save the trap. This is an unsigned char
* so that after 256 times the counter wraps and the behavior turns
* lazy again; this to deal with bursty apps that only use FPU for
* a short time
*/
unsigned char fpu_counter;
......
unsigned int policy;
cpumask_t cpus_allowed;
........
/* task state */
int exit_state;
int exit_code, exit_signal;
int pdeath_signal; /* The signal sent when the parent dies */
unsigned int jobctl; /* JOBCTL_*, siglock protected */
/* ??? */
unsigned int personality;
unsigned did_exec:1;
unsigned in_execve:1; /* Tell the LSMs that the process is doing an
* execve */
unsigned in_iowait:1;
/* Revert to default priority/policy when forking */
unsigned sched_reset_on_fork:1;
unsigned sched_contributes_to_load:1;
.....
pid_t pid;
pid_t tgid;
.....
/*
* pointers to (original) parent process, youngest child, younger sibling,
* older sibling, respectively. (p->father can be replaced with
* p->real_parent->pid)
*/
struct task_struct __rcu *real_parent; /* real parent process */
struct task_struct __rcu *parent; /* recipient of SIGCHLD, wait4() reports */
/*
* children/sibling forms the list of my natural children
*/
struct list_head children; /* list of my children */
struct list_head sibling; /* linkage in my parent's children list */
struct task_struct *group_leader; /* threadgroup leader */
/*
* ptraced is the list of tasks this task is using ptrace on.
* This includes both natural children and PTRACE_ATTACH targets.
* p->ptrace_entry is p's link on the p->parent->ptraced list.
*/
struct list_head ptraced;
struct list_head ptrace_entry;
/* PID/PID hash table linkage. */
struct pid_link pids[PIDTYPE_MAX];
struct list_head thread_group;
struct completion *vfork_done; /* for vfork() */
int __user *set_child_tid; /* CLONE_CHILD_SETTID */
int __user *clear_child_tid; /* CLONE_CHILD_CLEARTID */
cputime_t utime, stime, utimescaled, stimescaled;
cputime_t gtime;
.....
unsigned long nvcsw, nivcsw; /* context switch counts */
struct timespec start_time; /* monotonic time */
struct timespec real_start_time; /* boot based time */
/* mm fault and swap info: this can arguably be seen as either mm-specific or thread-specific */
unsigned long min_flt, maj_flt;
struct task_cputime cputime_expires;
struct list_head cpu_timers[3];
/* process credentials */
const struct cred __rcu *real_cred; /* objective and real subjective task
* credentials (COW) */
const struct cred __rcu *cred; /* effective (overridable) subjective task
* credentials (COW) */
struct cred *replacement_session_keyring; /* for KEYCTL_SESSION_TO_PARENT */
char comm[TASK_COMM_LEN]; /* executable name excluding path
- access with [gs]et_task_comm (which lock
it with task_lock())
- initialized normally by setup_new_exec */
......
/* CPU-specific state of this task */
struct thread_struct thread;
/* filesystem information */
struct fs_struct *fs;
/* open file information */
struct files_struct *files;
/* namespaces */
struct nsproxy *nsproxy;
/* signal handlers */
struct signal_struct *signal;
struct sighand_struct *sighand;
sigset_t blocked, real_blocked;
sigset_t saved_sigmask; /* restored if set_restore_sigmask() was used */
struct sigpending pending;
unsigned long sas_ss_sp;
size_t sas_ss_size;
int (*notifier)(void *priv);
void *notifier_data;
sigset_t *notifier_mask;
struct audit_context *audit_context;
......
seccomp_t seccomp;
/* Thread group tracking */
u32 parent_exec_id;
u32 self_exec_id;
/* Protection of (de-)allocation: mm, files, fs, tty, keyrings, mems_allowed,
* mempolicy */
spinlock_t alloc_lock;
/* Protection of the PI data structures: */
raw_spinlock_t pi_lock;
.....
.....
.....
/* journalling filesystem info */
void *journal_info;
/* stacked block device info */
struct bio_list *bio_list;
/* VM state */
struct reclaim_state *reclaim_state;
struct backing_dev_info *backing_dev_info;
struct io_context *io_context;
unsigned long ptrace_message;
siginfo_t *last_siginfo; /* For ptrace use. */
struct task_io_accounting ioac;
.....
struct rcu_head rcu;
/*
* cache last used pipe for splice
*/
struct pipe_inode_info *splice_pipe;
......
/*
* when (nr_dirtied >= nr_dirtied_pause), it's time to call
* balance_dirty_pages() for some dirty throttling pause
*/
int nr_dirtied;
int nr_dirtied_pause;
unsigned long dirty_paused_when; /* start of a write-and-pause period */
....
/*
* time slack values; these are used to round up poll() and
* select() etc timeout values. These are in nanoseconds.
*/
unsigned long timer_slack_ns;
unsigned long default_timer_slack_ns;
struct list_head *scm_work_list;
....
};
通过这个结构体我们看到task的很多属性。这个有助于我们理解PCB(Process Control Block)的属性。
task_struct结构即所谓的进程描述符,它包含了与一个进程相关的所有信息。进程描述符中不仅包含了许多描述进程属性的字段,而且还有一系列指向其他数据结构的指针。
- mm字段:指向mm_struct结构的指针,该类型用来描述进程整个的虚拟地址空间。
- fs字段:指向fs_struct结构的指针,该类型用来描述进程所在文件系统的根目录和当前进程所在的目录信息。
- files字段:指向files_struct结构的指针,该类型用来描述当前进程所打开文件的信息。
- signal字段:指向signal_struct结构(信号描述符)的指针,该类型用来描述进程所能处理的信号。
比如进程A创建了线程B,则B线程会在内核中对应一个轻量级进程。这个轻量级进程很自然的对应一个进程描述符,只不过B线程的进程描述符中的某些代表资源指针会和A进程中对应的字段指向同一个数据结构,这样就实现了多线程之间的资源共享。
由于内核线程只运行在内核态,并且只能由其他内核线程创建,所以内核线程并不需要和普通进程那样的独立地址空间。因此内核线程的进程描述符中的mm指针即为NULL。内核线程是否共享父内核线程的某些资源,则通过向内核线程创建函数kernel_thread()传递参数来决定。
通过上面的分析可以发现,内核中使用统一的进程描述符来表示进程、线程和内核线程,根据他们不同的特性,其进程描述符中某些代表资源的字段的指向会有所不同,以实现扮演不同角色。
===================================================
对于每一个进程而言,内核为其单独分配了一个内存区域,这个区域存储的是内核栈和该进程所对应的一个小型进程描述符——thread_info结构。之所以将thread_info结构称之为小型的进程描述符,是因为在这个结构中并没有直接包含与进程相关的字段,而是通过task字段指向具体某个进程描述符。通常这块内存区域的大小是8KB,也就是两个页的大小(有时候也使用一个页来存储,即4KB)。
在arch/x86/include/asm/thread_info.h中存在struct task_struct *task; /* main task structure */
struct thread_info {
struct task_struct *task; /* main task structure */
struct exec_domain *exec_domain; /* execution domain */
__u32 flags; /* low level flags */
__u32 status; /* thread synchronous flags */
__u32 cpu; /* current CPU */
int preempt_count; /* 0 => preemptable,<0 => BUG */
mm_segment_t addr_limit;
struct restart_block restart_block;
void __user *sysenter_return;
#ifdef CONFIG_X86_32
unsigned long previous_esp; /* ESP of the previous stack in
case of nested (IRQ) stacks
*/
__u8 supervisor_stack[0];
#endif
unsigned int sig_on_uaccess_error:1;
unsigned int uaccess_err:1; /* uaccess failed */
};
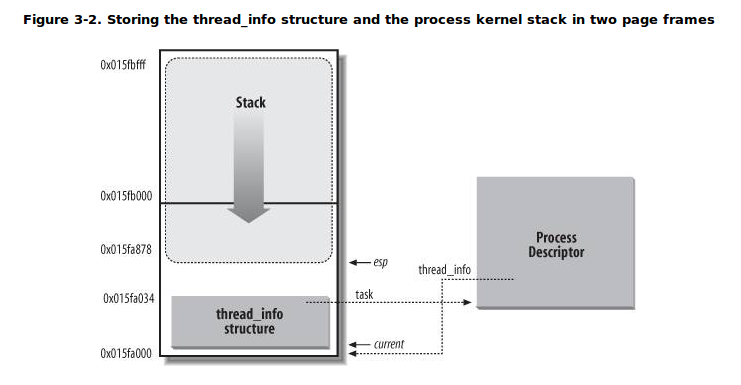
从上图可知,内核栈是从该内存区域的顶层向下(从高地址到低地址)增长的,而thread_info结构则是从该区域的开始处向上(从低地址到高地址)增长。内核栈的栈顶地址存储在esp寄存器中。所以,当进程从用户态切换到内核态后,esp寄存器指向这个区域的末端。
从代码的角度来看,内核栈和thread_info结构是被定义在一个联合体当中的:
//定义在linux/include/linux/sched.h中
union thread_union {
struct thread_info thread_info;
unsigned long stack[THREAD_SIZE/sizeof(long)];
};
THREAD_SIZE的值取8192时,stack数组的大小为2048;THREAD_SIZE的值取4096时,stack数组的大小为1024。
现在我们应该思考,为何要将内核栈和thread_info(其实也就相当于task_struct,只不过使用thread_info结构更节省空间)紧密的放在一起?
最主要的原因就是内核可以很容易的通过esp寄存器的值获得当前正在运行进程的thread_info结构的地址,进而获得当前进程描述符的地址。
途径就是屏蔽掉esp寄存器中的内核栈顶地址的低13位(或12位,当THREAD_SIZE为4096时)。此时ti所指的地址就是这片内存区域的起始地址,也就刚好是thread_info结构的地址。
有了thread_info结构的地址也就有了task的地址。
说了这么多其实就是为了引出内核编程的一个宏:current宏
为了获取当前CPU上运行进程的task_struct结构,内核提供了current宏,该宏本质上等价于
current_thread_info()->task,在include/asm-generic/current.h中定义:
#define get_current() (current_thread_info()->task) #define current get_current()